

27th ACM SIGSPATIAL・PredictGIS参加レポート
行灯LaboAI学会March 21, 2020
💁🏻
※本記事は Mobility Technologies の前身である JapanTaxi 時代に公開していたもので、記事中での会社やサービスに関する記述は公開当時のものです。

ACM SIGSPATIALとは
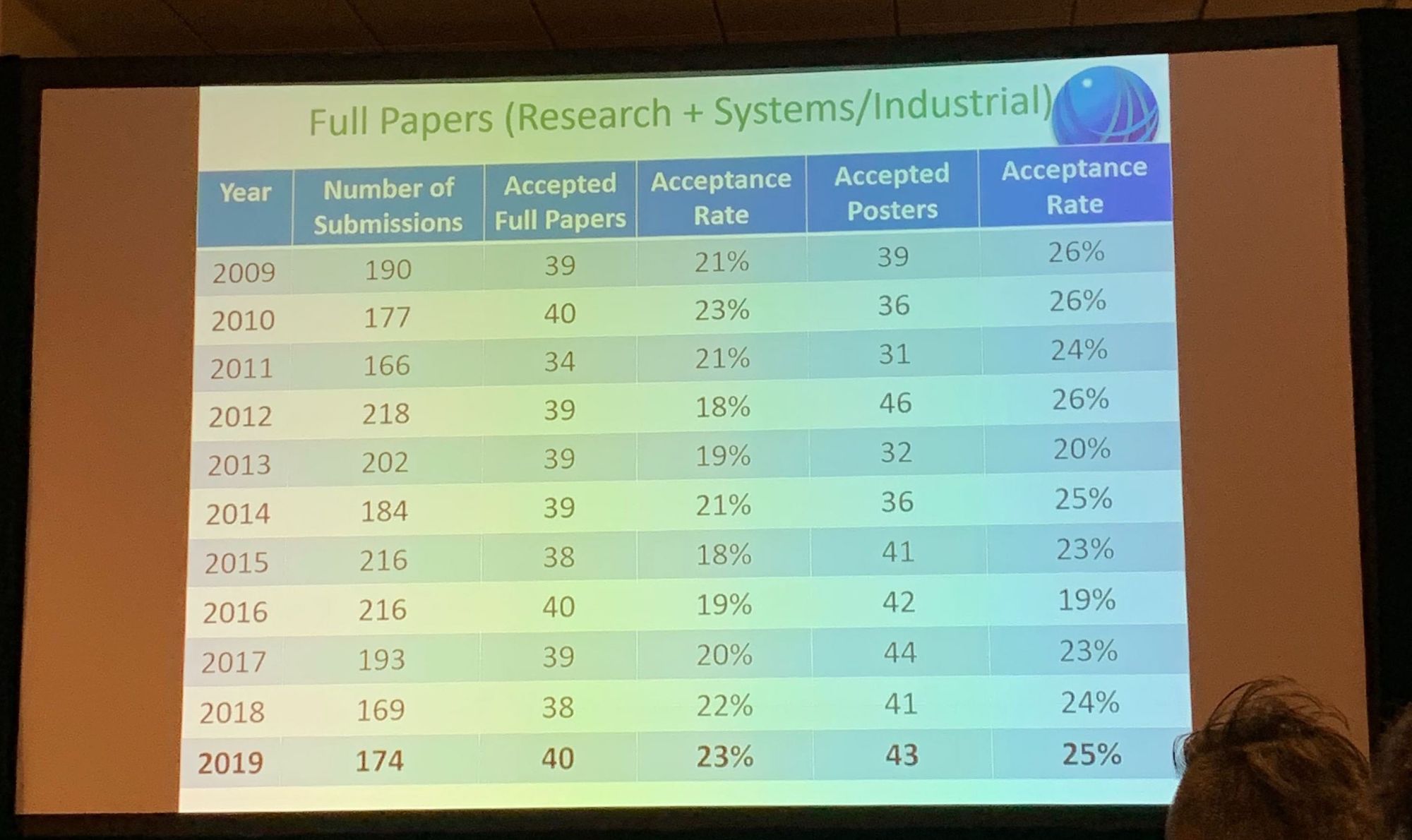
ACM SIGSPATIALとは地理情報システム関連の有名な国際会議です。(https://sigspatial2019.sigspatial.org/) 例年採択率は20%程度ということで、数あるカンファレンスの中でもかなり難易度の高いカンファレンスの一つとなります。
本記事では2019年11月05日ー2019年11月08日にアメリカ、シカゴで開催された27回目のSIGSPATIAL(27th ACM SIGSPATIAL 2019)本会議への参加と初日に行われたPredictGISというワークショップでの発表について報告します。
ワークショップ(PredictGIS)での発表
今回はSIGSPATIAL本会議の初日に行われたPredictGISにて学生インターン時代の研究成果を発表してきました。(http://predictgis.umnilab.com/)

PredictGISとはNPP(Next Place Prediction)やSTP(Spatio-temporal Prediction)を始めとする人間の流動性予測などをテーマとするワークショップとなっており、車両位置情報データや交通事故データ、あるエリアでの位置情報付き犯罪データを基にした色々な予測モデルに関する研究発表が行われておりました。
その中で私は
「Context-based Markov Model toward Spatio-Temporal Prediction with Realistic Dataset」
というタイトルで学生インターン時代の研究成果を発表をしました。

国際的に活躍する研究者の皆様に発表を聞いていただいたことや意見交換を行うことができたことは非常に良い経験となりました。
個人的に面白かった論文紹介
以降は本会議において個人的に面白かった3つの論文を簡単に紹介させていただきます。
HTTE: A Hybrid Technique For Travel Time Estimation In Sparse Data Environments
著者: Nikolaos Zygouras (NKUA) et al.
バスとタクシーを対象とした出発地から目的地までにどれくらい時間がかかるのかを予測する研究でした。
直近・過去の交通状態を考慮できるフレームワークの提案これまでにない道路情報の分散表現を学習
という2点が面白かったです。
提案していたフレームワークの概要

道路の考慮する道路全てに対して30分区切りの平均通過時間を基に学習した分散表現を用いることで、混雑具合で同じような特徴を持った道路は近くにマッピングされる。
提案手法により学習した分散学習

JapanTaxiでは日々のタクシー車両の動きを蓄積しているので、道路の混雑情報の分散表現も同じ手法で学習できます。
このようにして得られた混雑情報を活用することで更にアプリを進化させていくことができそうです。
Learning Embeddings of Intersections on Road Networks
著者: Mengxiang Wang (Northeastern University) et al.
次は交差点の情報に対する分散表現を獲得するための研究です。
ある交差点と比較する交差点をペアとして、ペアの類似度を
地理的距離の近さ(geo-spatial locality)交差点に設置されている標識の種類(intersection tag)交差点の形状(N-way type)
の3つの特徴で算出し、それら3つの特徴を予測するための分散表現dを学習するのが大まかな流れです。
論文中で提案された交差点の分散表現を得るためのフレームワーク

各交差点には、こちらのように色々な形状のものがありますが、得られた分散表現を用いることで類似した交差点同士を簡単に抽出することができるようになります。

また組み合わせ数が多いことから従来のネットワークモデルでは、ランダムウォークの手法が使われていることが多かったが、こちらの論文ではランダムに2つの交差点を選択し、その2つを繋ぐ最短経路に存在する交差点をサンプリングするというような従来のネットワークモデルとは異なるサンプリングを行ったことで精度の向上を行えるという主張もしていました。
Bayesian Surprise in Indoor Environments
著者: Sebastian Feld (Ludwig Maximilian University of Munich) et al.
屋内で使用されるロボットやゲームのノンプレイヤーキャラクター(NPC)などのエージェントが、部屋やフィールドの間取りを特徴付けるために
こちらは上記2つの論文とは打って変わって3次元空間での物体に対する驚きを定量化した論文でした。
こちらの論文は
Isovist(アイソビスタ)Bayesian Surprise(ベイジアンサプライズ)
という2つの概念を融合させたことを新規性として取り上げていました。
それぞれの概念について簡単に説明させていただきますと、
Isovist(アイソビスタ) はある観測点xからの空間の見え方を特徴量で表現できるように定義したもので、特徴量はarea(下図の青い部分)やperimeter(計算されたエッジの長さ)などがあります。

ダンジョンを探索するゲームなどをイメージしていただけるとわかりやすいかと思いますが、下図のようにプレイヤーが現在位置から観測できる情報を定量化したものとなります。

Bayesian Surprise(ベイジアンサプライズ) は、主観的な期待を定義したものとなっており、ある事前分布と事後分布の相違度(KL Divergence)が大きいほど驚きが大きいというようなものになります。
屋内測位の文脈で、このIsovistを入力にBayesian Surpriseを計算した例が下図になります。
特徴量を面積としてBayesian Surpriseを計算した例

各特徴量の持つ分布や事前分布、事後分布に多項分布、ディリクレ分布を仮定し各ステップごとにBayesian Surpriseを更新すると、異常なパターンが現れるときにBayesian Surprise値が増大しますが、徐々に慣れてきて値が小さくなります。

実際に大学の一区画での経路を使ってBayesian Surprise計算した実験などもあって今後は屋内測位の文脈だけではなく、異常検知や安全運転支援、自動運転のコースシミュレーションにも利用できそうな概念だと感じました。
最後に
JapanTaxiにおいて、位置情報データの扱いやそれに付随する予測モデルなどはかなり重要な要素となるので、国際的に活躍する研究者の皆様と意見交換を行うことができたことは非常に良い経験になりました。
今後もこのような機会があれば積極的に手を上げていきたいです。
💁🏻
※本記事は Mobility Technologies の前身である JapanTaxi 時代に公開していたもので、記事中での会社やサービスに関する記述は公開当時のものです。
Mobility Technologies では共に日本のモビリティを進化させていくエンジニアを募集しています。話を聞いてみたいという方は、是非 募集ページ からご相談ください!